Call For Papers: Special Issue on Architected Materials Design
Architected metamaterials (AMMs) utilize engineered architectures at various scales (e.g.,
Architected metamaterials (AMMs) utilize engineered architectures at various scales (e.g.,
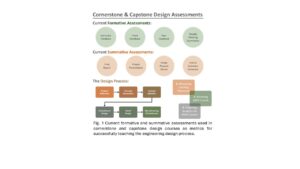
Undergraduate engineering students are expected to develop strong design and professional skills. These skills are often difficult to teach and assess effectively throughout a degree program. This article examines how design education develops from introductory courses through capstone design within undergraduate programs and highlights the need for structured and repeated formative assessment. The study synthesizes evidence from multiple institutions to capture diverse approaches to teaching and assessing engineering design. Their findings show that while programs consistently introduce hands-on teamwork and problem-solving experiences, many programs lack consistent formative feedback and structured reflection needed for real skill development. Survey data, public information, and faculty vignettes were leveraged to reveal that most programs assess design outcomes rather than the learning process itself. Multiple design projects, frequent feedback, and iterative reflection opportunities are recommended in order to reinforce what students learn about the engineering design process over time. In addition, the work calls for better integration of professional skills into undergraduate design experiences. These findings invite educators to rethink how design learning evolves, ensuring that skill development continues well beyond the classroom and prepares future engineers to meet the complex, multidisciplinary challenges of modern practice.
Authors: Yakira Mirabito, Xiaowen Liu, Kosa Goucher-Lambert Design rationales are

Authors: Haizhu Zhang, Ba Rao, Xiang Chen, Rong Li, Kai

This paper introduces the Functional Reasoning Design Language (FRDL), a formal
Frontiers in Mechanism Design: AI-Designed Linkages, 4D-Printed Motion, and Deployable
The engineering design community is confronting problems of unprecedented complexity
A Collaborative Effort between ASME’s Design Engineering Division (DED) and
Engineering design is undergoing a profound transformation with the rise
Join us for the ASME Journal of Mechanical Design (JMD)