Authors: Maoguo Li, Ning Zhang, Yan Xing, Boyi Liu, Wenyuan Su, Shiyu Li, Shenxin Sun
The gripper for nest frames plays a critical role in automated beekeeping operations, yet the unique structure of these frames imposes stringent requirements on its design. To address this challenge, this paper proposes a flexible multi-constraint gripper specifically optimized for nest frame grasping, which integrates a fixation mechanism, a driving mechanism, and a limiting mechanism. Kinematic and dynamic models are then established, and a back-propagation neural network is employed to optimize the key component parameters. Subsequently, both a virtual prototype and an experimental prototype are developed to evaluate the gripper performance through simulations and physical experiments. Experimental results demonstrate that the gripper achieves stable grasping of nest frames in three different sizes commonly used in beekeeping. This design is expected to advance automated beekeeping and offer new perspectives for the design and optimization of flexible end effectors in agricultural robotics.
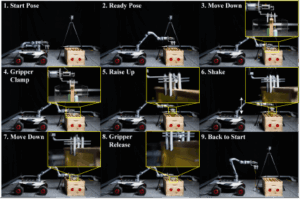
Fig. 1 The motion of the manipulator and the gripper
This work presents a flexible multi-constraint gripper designed specifically for grasping and shaking nest frames, integrating kinematic/dynamic modeling with BP neural network optimization. Experiments show stable grasping across three frame sizes and shake amplitudes exceeding 80 mm, advancing flexible end-effector design in agricultural robotics.