Structural Designs of Novel Deployable Polyhedral Grippers for Noncontact Capturing Missions
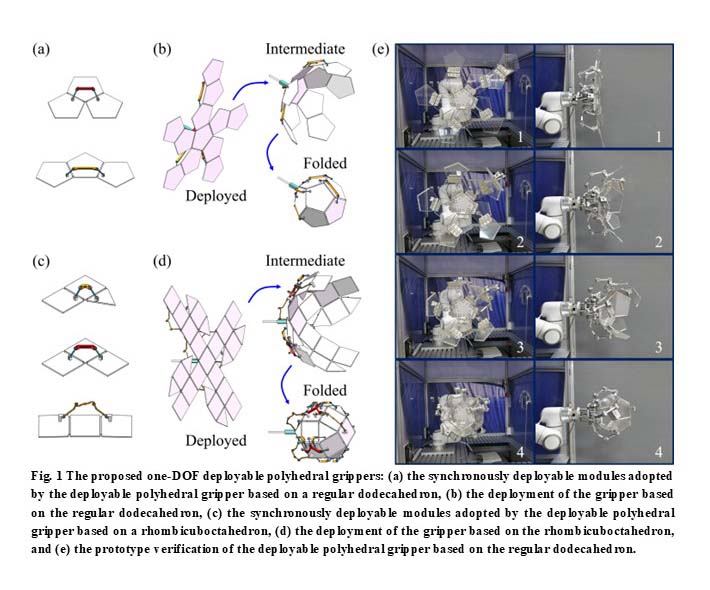
Authors: Ruijie Tang, Qizhi Meng, Fugui Xie, Xin-Jun Liu, and Jinsong Wang Deployable polyhedral grippers can approach the target when deployed, then enclose and capture the targets at the folded state. These grippers have attracted increasing attention for their priority in noncontact capturing missions, including the capture of spatial non-cooperative targets and delicate marine organisms. […]
Designing Together: Exploring Collaborative Dynamics of Multi-Objective Design Problems in Virtual Environments
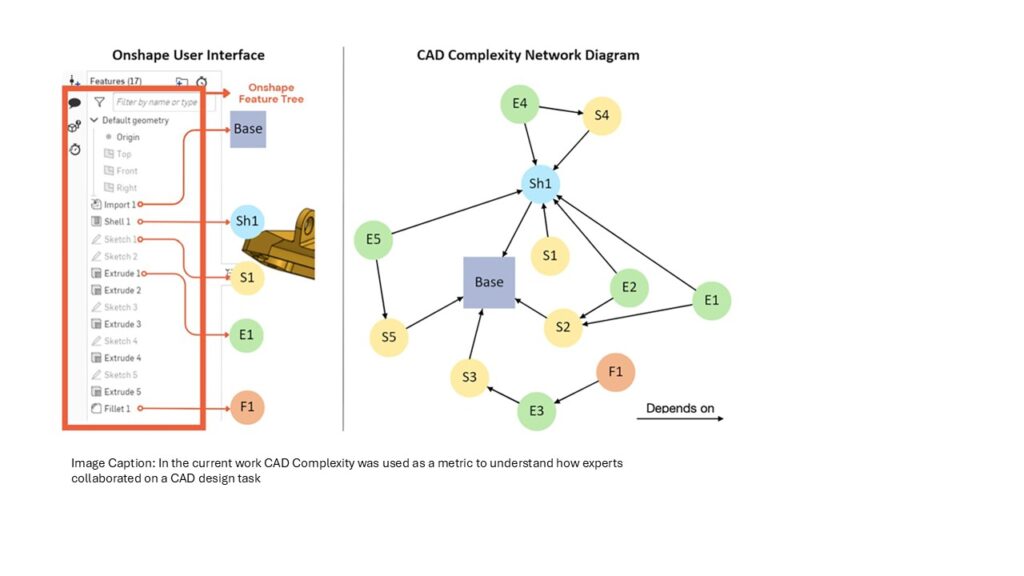
Authors: Debrina Roy, Nicole Calpin, Kathy Cheng, Alison Olechowski, Andrea P. Argüelles, Nicolás F. Soria Zurita, Jessica Menold This study explores how experts from different fields collaborate virtually on complex designproblems, focusing on how additive manufacturing (AM) and non-destructive evaluation (NDE) experts work together in a collaborative CAD environment. As technologies like AM advance rapidly, interdisciplinary teams […]
Call For Papers: Special Issue on Design and Synthesis of Remote Center of Motion Mechanisms
Robotic manipulators capable of generating a Remote Center of Motion (RCM) enable a device, instrument, or tool to rotate around a fixed point that is called the Center of Rotation (CoR). In medical applications, for example, the increasing use of minimally invasive procedures, known as Minimally Invasive Surgery (MIS), has spurred reliance on RCM kinematics […]
Novel Soft Gripper With Adjustable Performance Based on Blade Flexures

Authors: Mauricio Arredondo-Soto, Enrique Cuan-Urquizo, Alfonso Gómez-Espinosa, Armando Roman-Flores, and Rafiq Ahmad A innovative overlay soft gripper is presented, it employs an assembling mechanism that allows for adjustments in grip size, orientation, and gripping force, providing versatile handling capabilities. The gripping force can be fine-tuned by altering the stiffness, achieved by adjusting the effective length […]
Deep Learning Conceptual Design of Sit-to-Stand Parallel Motion Six-Bar Mechanisms
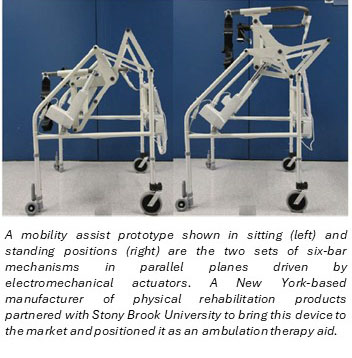
Authors; Zhijie Lyu and Anurag Purwar This paper presents a new way to design mobility assistant devices that help people stand up from a seated position, especially those suffering from neuro-muscular disabilities and challenges. The researchers developed a method using machine learning and kinematics (the study of motion) to create six-bar linkage mechanisms that mimic […]
Recording of the 12th JMD webinar held on January 16, 2025. The webinar theme is Design of Materials and Structures.
The JMD Webinar is a series of webinars organized quarterly by the Editorial Board of the ASME Journal of Mechanical Design(JMD) serving the engineering design research community. Our intention is to share the latest research published in the journal, and by doing so, to keep our community connected. This JMD webinar will include two […]
Special Issue: Design by Data: Cultivating Datasets for Engineering Design
In today’s rapidly evolving world, data plays a pivotal role across various sectors including engineering. The success of data-driven methods in image and text analysis is largely due to adequately large datasets, which have advanced deep learning and enabled tools like ChatGPT, Bard, and Stable Diffusion. Data-driven design is revolutionizing engineering design, enhancing design theory, […]
Constraining the Feasible Design Space in Bayesian Optimization With User Feedback
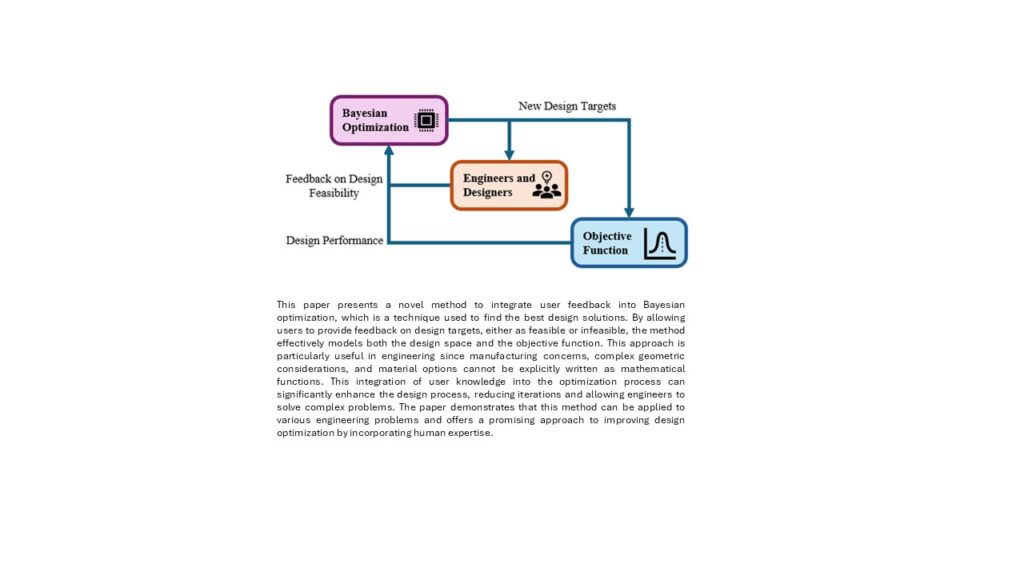
Authors: Cole Jetton, Matthew Campbell, Christopher Hoyle Abstract This paper develops a method to integrate user knowledge into the optimization process by simultaneously modelling feasible design space and optimizing an objective function. In engineering, feasible design space is a constraint similar to those in optimization problems. However, not all constraints can be explicitly written as […]