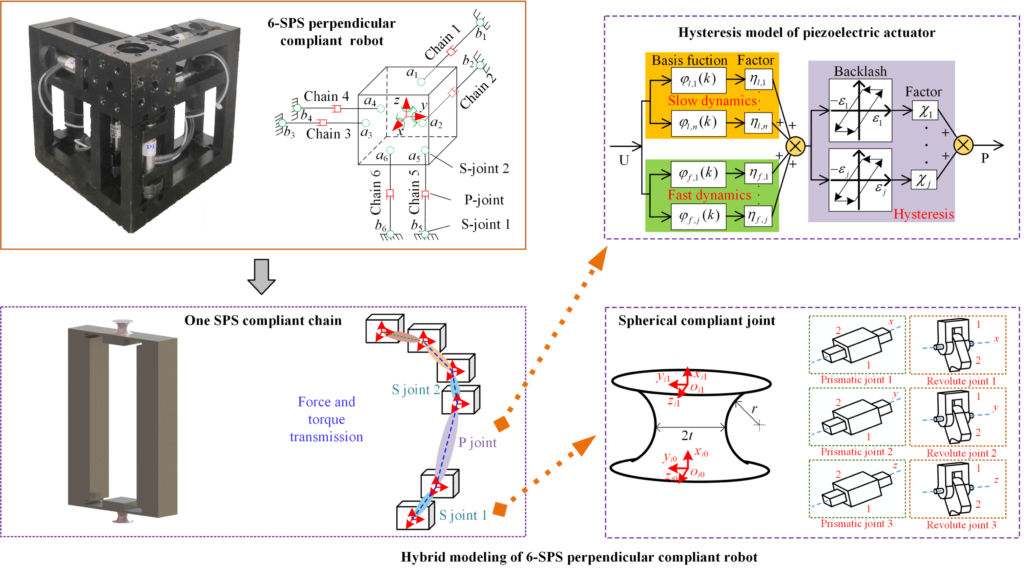
Nanopositioning robots with an ultrahigh resolution are widely used in engineering applications. Generally, the nanopositioning robot is composed of a compliant mechanism, an actuator, and a control system. However, it is difficult to establish the model between voltage and end-effector pose due to compliant joints and piezoelectric actuators. We proposed a modeling method for a 6-SPS perpendicular compliant parallel micro-manipulation robot considering the motion in nonfunctional directions and hysteresis to reflect the characteristic from input voltage to output pose. The motion of spherical compliant joint is regarded as a spatial six degrees-of-freedom (DOF) mechanism. This method considers the motion errors in multiple nonfunctional directions of compliant joints. Simulations and experiments reveal the fine modeling performance of the proposed method for the precision motion systems in the presence of intrinsic hysteresis and motion error of compliant joints.