Laxmi Poudel, Saivipulteja Elagandula, Wenchao Zhou, and Zhenghui Sha, “Decentralized and Centralized Planning for Multi-Robot Additive Manufacturing.” ASME. J. Mech. Des. January 2023; 145(1): 012003. https://doi.org/10.1115/1.4055735
Modern manufacturing systems often rely on central decision-makers for scheduling and planning. However, such a setup requires expensive resources and is vulnerable to uncertainties, especially when the scale of a manufacturing job increases. Natural swarms, such as ant colonies, have exhibited inspiring behaviors that can overcome the limitations of central setup in their daily activities, such as building nests and food foraging. The key is that, in decentralized systems, individual entities follow simple rules and make decisions based on local information obtained from neighbors and environmental stimuli. Inspired by natural swarms, we developed a set of local behavioral rules for manufacturing scheduling and planning and created a computer simulation to prove how a swarm of manufacturing robots can work together, building and transporting complex parts without collisions. We compared our decentralized approach with a centralized model for large-scale additive manufacturing. The results showed that our approach provides better scalability without a significant increase in computational demand, more robust against failure, and can cooperate without conflicts.
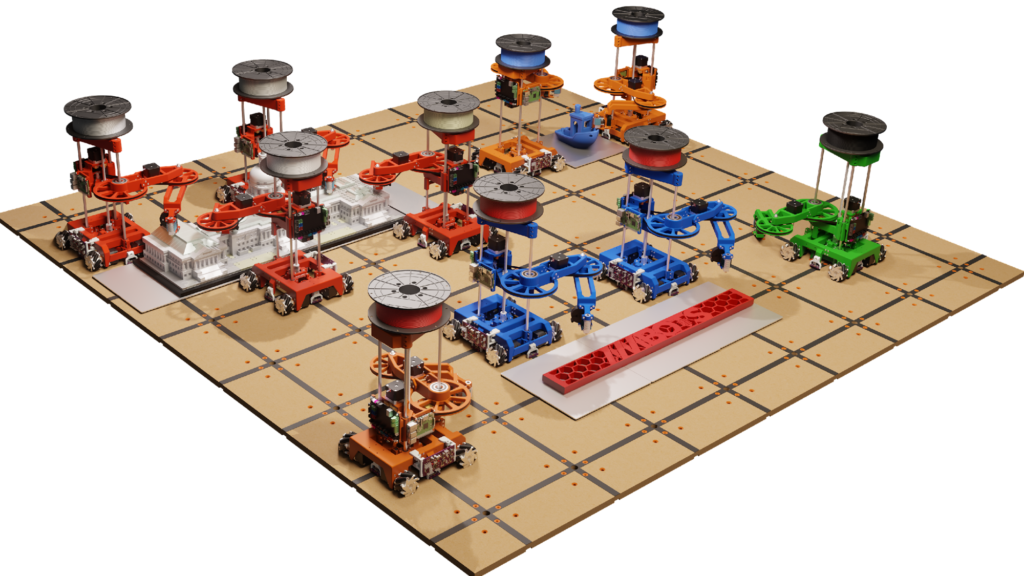
An illustration of a swarm of mobile printers working cooperatively and autonomously on various manufacturing jobs in parallel