Co-Design of the Morphology and Actuation of Soft Robots for Locomotion
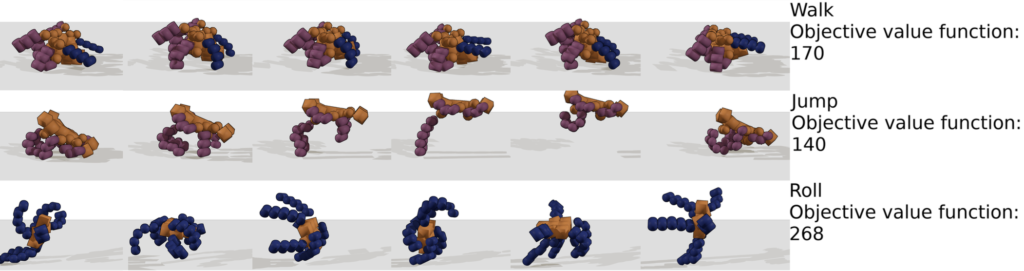
This paper proposes a Computational Design Synthesis (CDS) method for the automated design of virtual, soft robot morphologies with the automated co-design of actuation. In the first method, the actuation of designs is described by Parametric Actuation Curves (PACs) that model feedforward actuation patterns.
2021 Editor’s Choice Paper Awards and Honorable Mention
We are pleased to announce the two (2) winners for the Journal of Mechanical Design 2021 Editors’ Choice Paper Award. In the Category of Design Methods: Khalil Al Handawi, Petter Andersson, Massimo Panarotto, Ola Isaksson, and Michael Kokkolaras (August 18, 2020). “Scalable Set-Based Design Optimization and Remanufacturing for Meeting Changing Requirements.” ASME. J. Mech. Des. February 2021; […]
Design of Digital Twin Sensing Strategies Via Predictive Modeling and Interpretable Machine Learning
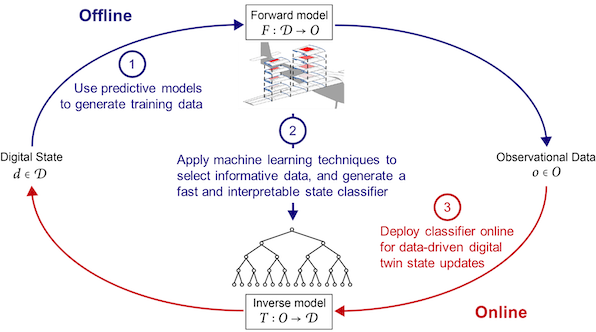
This work develops a methodology for combining predictive physics-based models with an interpretable machine learning technique in order to determine optimal sensor placement and dynamic sensor scheduling decisions for Digital Twins.