Toward Reusable Surrogate Models: Graph-Based Transfer Learning on Trusses
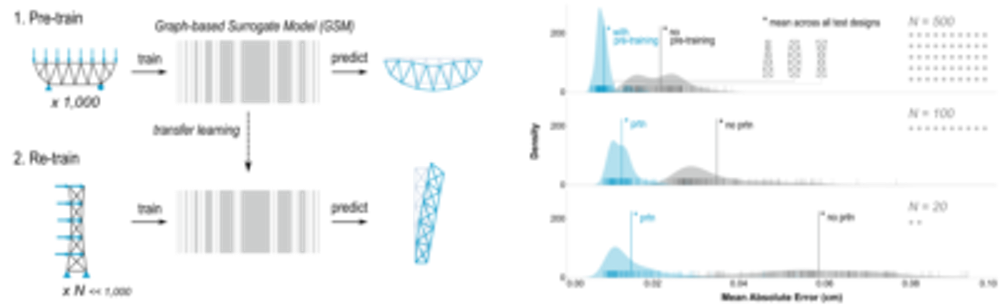
This paper proposes Graph-based Surrogate Models (GSMs) for trusses, which can accurately predict a trusses’ structural performance given only its geometry and loads as inputs. Since the GSM does not rely on design variables to make predictions, the model can be trained and used on designs from multiple sources.
View JMD’s 4th Webinar on “Robot Design”
JMD’s 4rd Webinar on “Robot Design,” held on December 9, 2021, featured talks by Guanglu Jia, Yu She, and Andrew P. Sabelhaus. To view the recording please visit JMD’s Webinar page.